本节主要介绍了同步FIFO与异步FIFO的工作原理与硬件设计的关键,并列举了示例代码。
FIFO概述
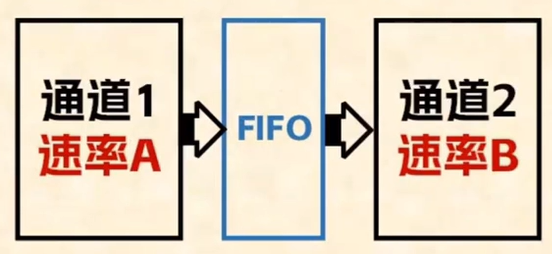
FIFO(First In First Out),是一种先进先出的数据缓存器。其不可寻址,只能顺序写入、顺序读出,数据地址由内部读写地址自动加1完成(这里注意与RAM的区分:RAM支持外部给定地址读写数据),通常硬件上实现的是循环队列
FIFO的功能:FIFO是速率匹配中的一个缓冲环节,一般用于连接两个速率不同的数据通路
FIFO分类:
- 同步FIFO:
- 特点:数据写入FIFO的时钟和数据读出FIFO的时钟是同步的
- 作用:作为交互数据的缓冲,相当于一个buffer
- 异步FIFO:
- 特点:数据写入FIFO的时钟和数据读出FIFO的时钟是异步的
- 作用:实现数据在不同时钟域之间进行传递,或作为不同数据宽度的数据接口(比如写的数据是8个bit,读出的数据是16bit,或者写的是16个bit,读出的数据是8个bit)
- 同步FIFO:
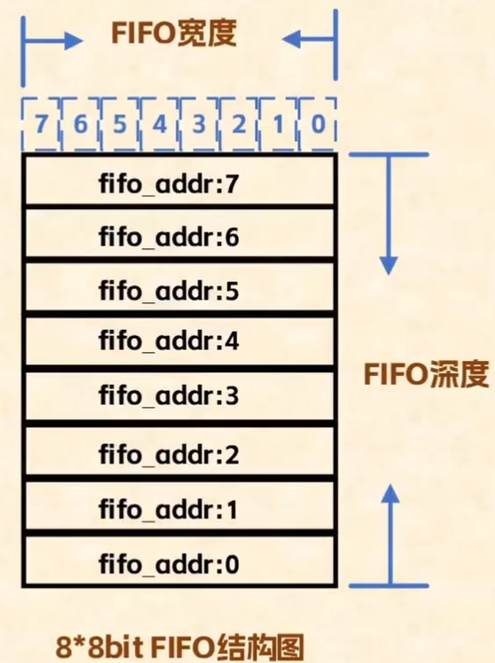
FIFO深度与宽度:
- FIFO宽度:用fifo_data_size表示,也就是FIFO存储的每个数据宽度
- FIFO深度:用fifo_addr_size表示,也就是能存储多少个数据
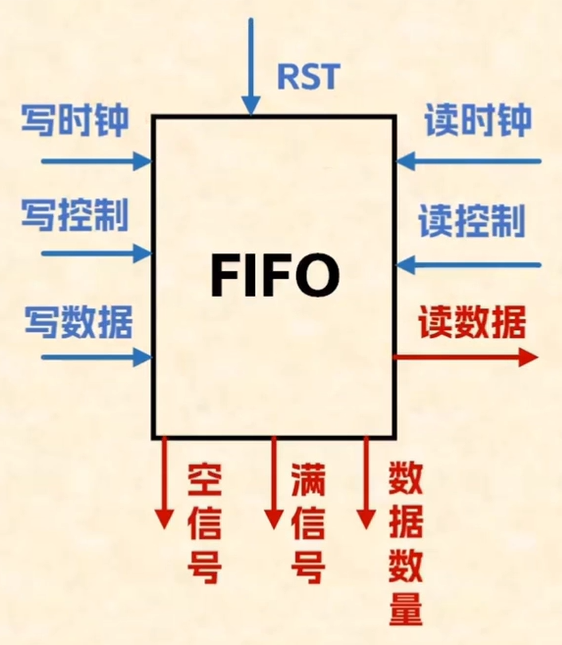
FIFO中相关信号:
- 时钟、复位:clk,rst_n_i
- 读使能(读控制):rd_en_i
- 写使能(写控制):wr_en_i
- 满信号(满标志):full,当FIFO中的数据满(或接近满),不再能进行数据的写入
- 空信号(空标志):empty,当FIFO为空(或接近空),不再能进行数据的读出
同步FIFO
1.设计关键
“空”和“满”信号的判断:
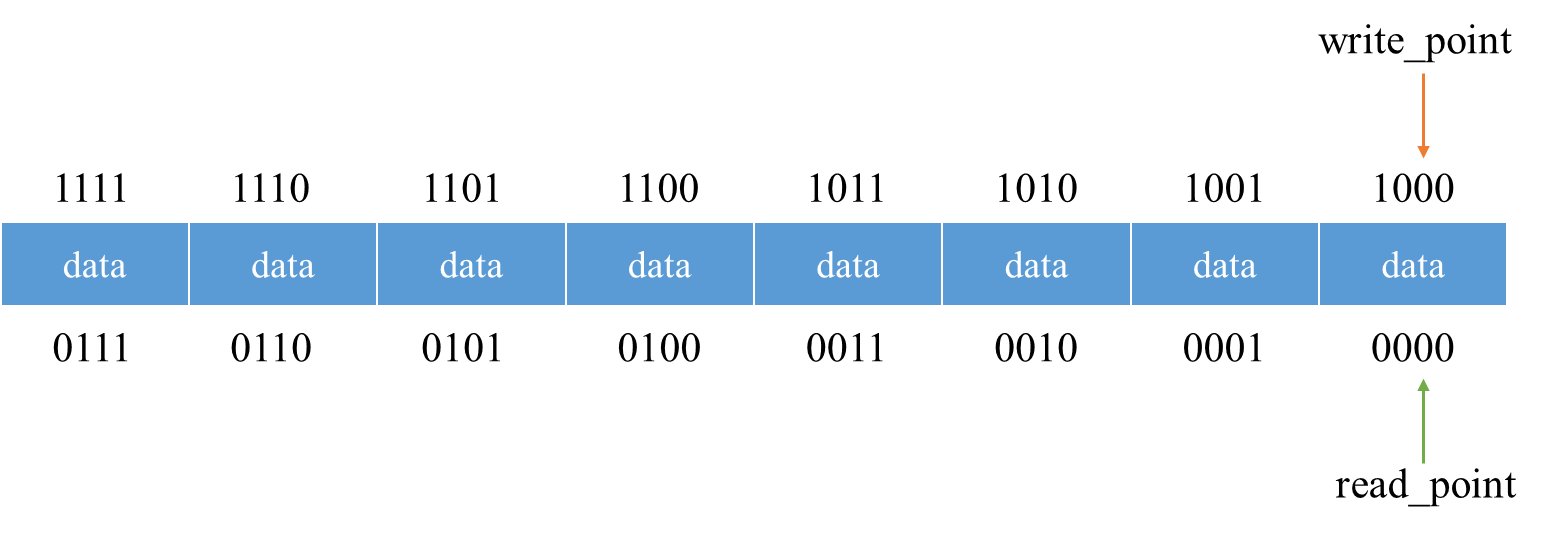
首先来看一个正常循环FIFO的空满信号判断流程:
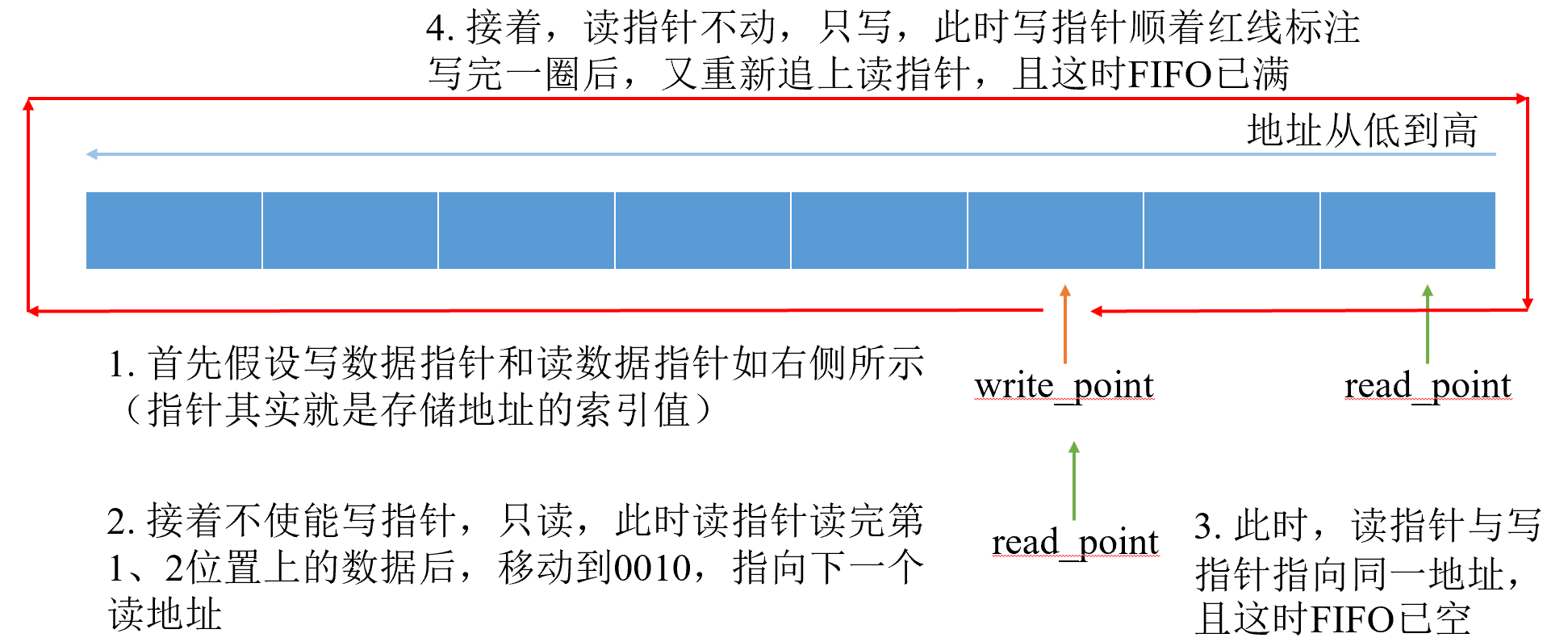
由上图可以总结出:
- 当读指针追上写指针时,FIFO为空
- 当写指针追上读指针时,FIFO为满
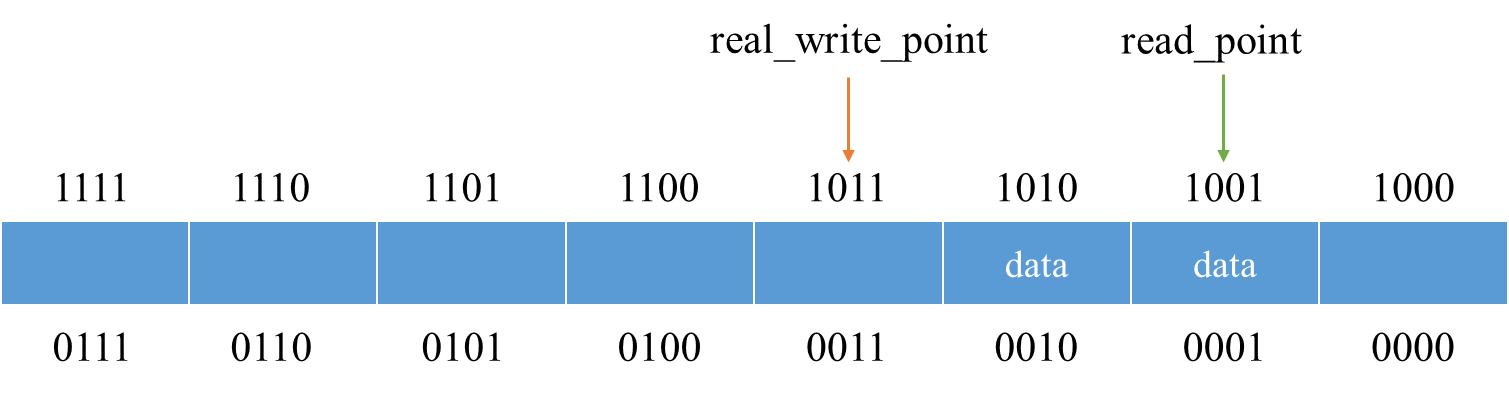
由于FIFO空和满状态时,读写指针都指向相同位置,那么如何较好的判断究竟是空还是满呢?答案是:将地址指针扩展1bit
- 在深度为8的FIFO中,需要3bit的读写指针来分别指示读写地址3’b000-3’b111这8个地址。若将地址指针扩展1bit,则变成4bit的地址,而地址表示区间则变成了4’b0000-4’b1111。假设不看最高位的话,后面3位的表示区间仍然是3’b000-3’b111,也就意味着最高位可以拿来作为指示位。
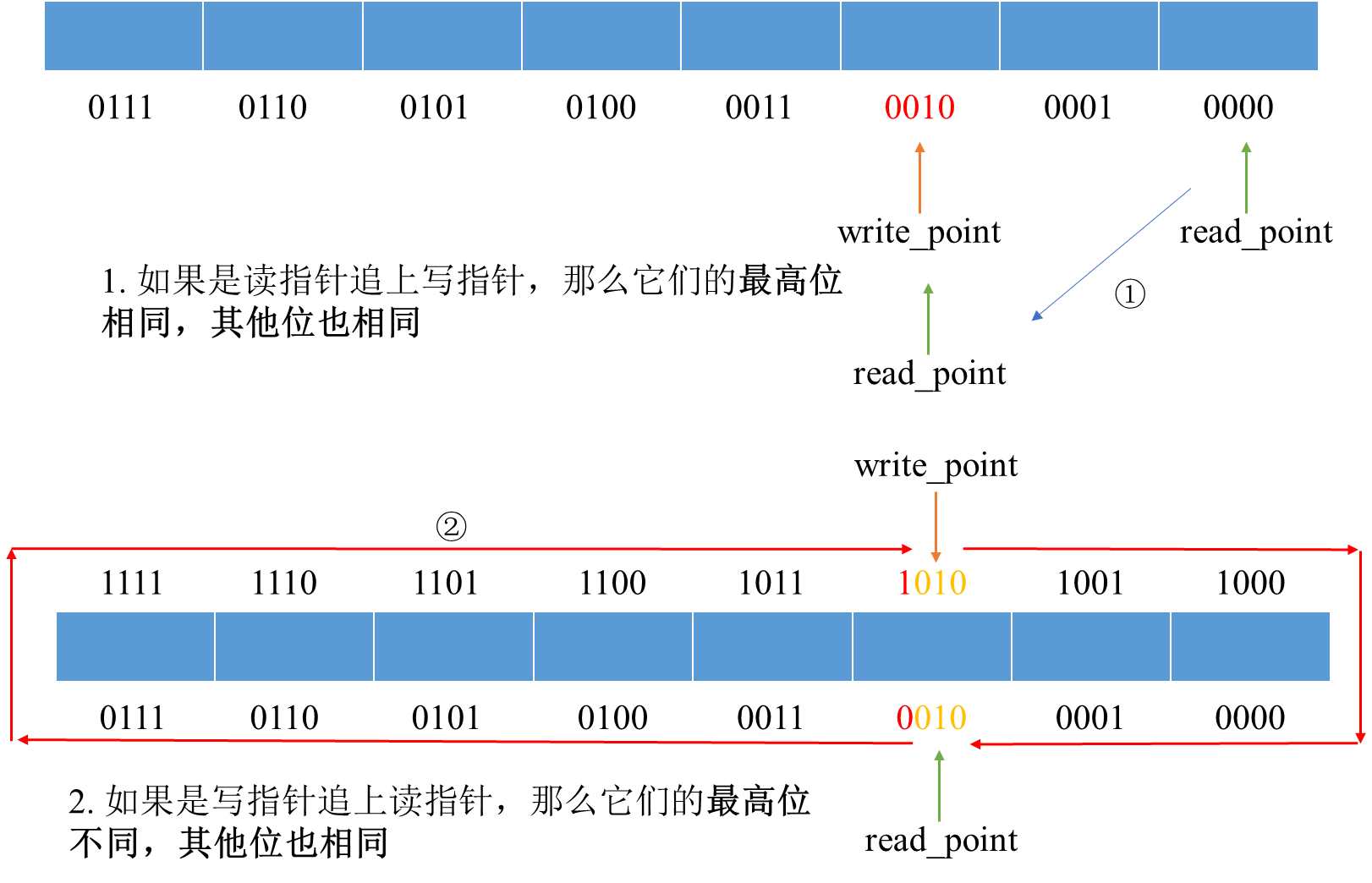
- 由上图可以总结出:
- 读写指针相同,FIFO为空状态
- 读写指针最高位相反,其他位相同,FIFO为满状态
- 在深度为8的FIFO中,需要3bit的读写指针来分别指示读写地址3’b000-3’b111这8个地址。若将地址指针扩展1bit,则变成4bit的地址,而地址表示区间则变成了4’b0000-4’b1111。假设不看最高位的话,后面3位的表示区间仍然是3’b000-3’b111,也就意味着最高位可以拿来作为指示位。
2.源代码
sync_fifo.v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68module sync_fifo #(
parameter DEPTH = 8,
parameter WIDTH = 8
) (
input wire clk,
input wire rst_n,
input wire i_wen,
input wire [WIDTH-1:0] i_wdata,
input wire i_ren,
output reg [WIDTH-1:0] o_rdata,
output wire o_empty,
output wire o_full
);
parameter ADDR_WIDTH = $clog2(DEPTH);
reg [WIDTH-1:0] mem[DEPTH-1:0];
reg [ADDR_WIDTH:0] wptr, wptr_next;
reg [ADDR_WIDTH:0] rptr, rptr_next;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
wptr <= {ADDR_WIDTH{1'b0}};
rptr <= {ADDR_WIDTH{1'b0}};
end else begin
wptr <= wptr_next;
rptr <= rptr_next;
end
end
always @(*) begin
wptr_next = wptr;
rptr_next = rptr;
if (i_wen && !o_full) begin
wptr_next = wptr + 1'b1;
end
if (i_ren && !o_empty) begin
rptr_next = rptr + 1'b1;
end
end
integer i;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
for (i = 0; i < DEPTH; i = i + 1) begin
mem[i] <= 0;
end
end else if (i_wen && !o_full) begin
mem[wptr[ADDR_WIDTH-1:0]] <= i_wdata;
end
end
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
o_rdata <= 0;
end else if (i_ren && !o_empty) begin
o_rdata <= mem[rptr[ADDR_WIDTH-1:0]];
end
end
assign o_empty = wptr == rptr;
assign o_full = wptr == {~rptr[ADDR_WIDTH], rptr[ADDR_WIDTH-1:0]};
endmodule
3.Testbench
sync_fifo_tb.v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80//时间单位/精度
//------------<模块及端口声明>----------------------------------------
module sync_fifo_tb();
parameter DATA_WIDTH = 8 ; //FIFO位宽
parameter DATA_DEPTH = 8 ; //FIFO深度
reg clk ;
reg rst_n ;
reg [DATA_WIDTH-1:0] data_in ;
reg rd_en ;
reg wr_en ;
wire [DATA_WIDTH-1:0] data_out;
wire empty ;
wire full ;
//------------<例化被测试模块>----------------------------------------
sync_fifo
#(
.DEPTH (DATA_WIDTH), //FIFO位宽
.WIDTH (DATA_DEPTH) //FIFO深度
)
sync_fifo_ptr_inst(
.clk (clk ),
.rst_n (rst_n ),
.i_wdata (data_in ),
.i_ren (rd_en ),
.i_wen (wr_en ),
.o_rdata (data_out ),
.o_empty (empty ),
.o_full (full )
);
//------------<设置初始测试条件>----------------------------------------
initial begin
clk = 1'b0; //初始时钟为0
rst_n <= 1'b0; //初始复位
data_in <= 'd0;
wr_en <= 1'b0;
rd_en <= 1'b0;
//重复8次写操作,让FIFO写满
repeat(8) begin
@(negedge clk)begin
rst_n <= 1'b1;
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
end
end
//重复8次读操作,让FIFO读空
repeat(8) begin
@(negedge clk)begin
wr_en <= 1'b0;
rd_en <= 1'd1;
end
end
//重复4次写操作,写入4个随机数据
repeat(4) begin
@(negedge clk)begin
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
rd_en <= 1'b0;
end
end
//持续同时对FIFO读写,写入数据为随机数据
forever begin
@(negedge clk)begin
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
rd_en <= 1'b1;
end
end
end
//------------<设置时钟>----------------------------------------------
always #10 clk = ~clk; //系统时钟周期20ns
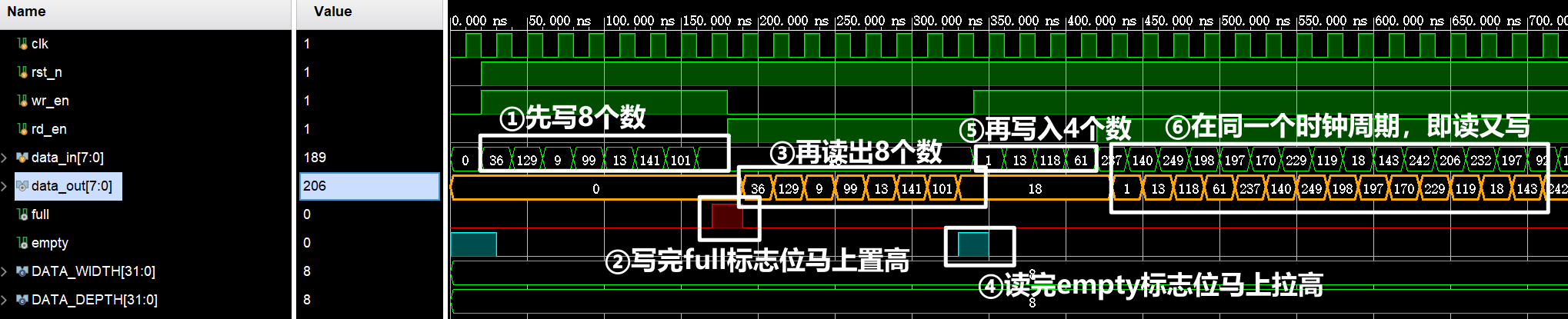
endmodule结果如下:
异步FIFO
1.设计关键
“空”和“满”信号的判断:
异步FIFO也可以用同步FIFO的方式去判断空满状态,但是!!!,异步FIFO存在跨时钟域的问题,它存在亚阈值问题,如果仍然使用二进制编码方式的话,会大大增加出现亚阈值状态的概率
首先,先解释为什么跨时钟域容易出现亚阈值问题(亚阈值问题就是数据不满足触发器的建立时间和保持时间,在时钟跳变沿时采集到了一个不稳定的状态,详情见Reference)
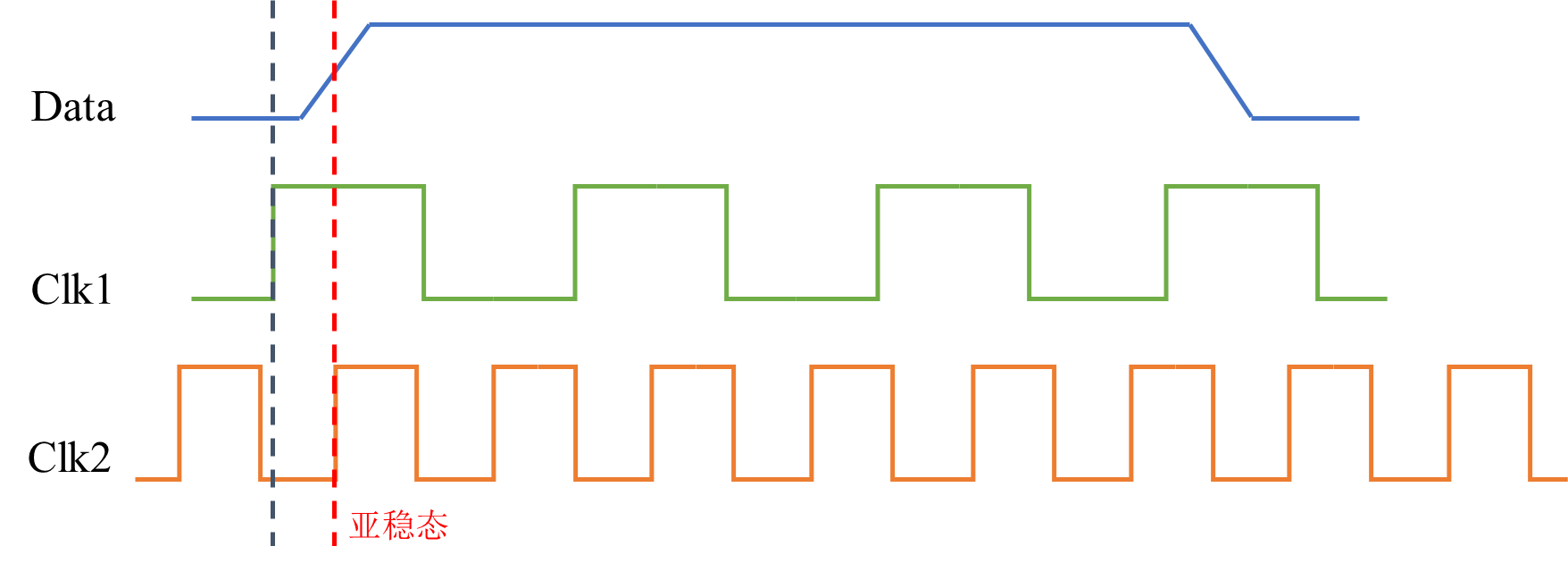
二进制的7(0111)跳转到8(1000),4位都会发生变化,所以发生亚稳态的概率就比较大,那么我们如何减少发生亚稳态的概率呢?答案是:用格雷码
格雷码是相邻数字之间只有1个bit的变化,那么就会大大减少亚稳态发生的概率
二进制与格雷码的转化:二进制码右移一位^二进制码=格雷码(^代表异或)
如何用格雷码判断空满:
读写指针相同,即认为空
当最高位和次高位不同,其余位相同认为是写满
跨时钟域的同步问题:因为读指针与写指针是受不同时钟控制的,所以它们之间的比较,需要先同步到一个时钟下(这里的同步都是指使用2个(或者3个,但此类情况不多)FF(触发器)来进行同步(俗称“打两拍”),我的理解是用这两拍的时间先锁存一个指针,然后再将这个指针与经过了2拍之后的另一个指针比较)
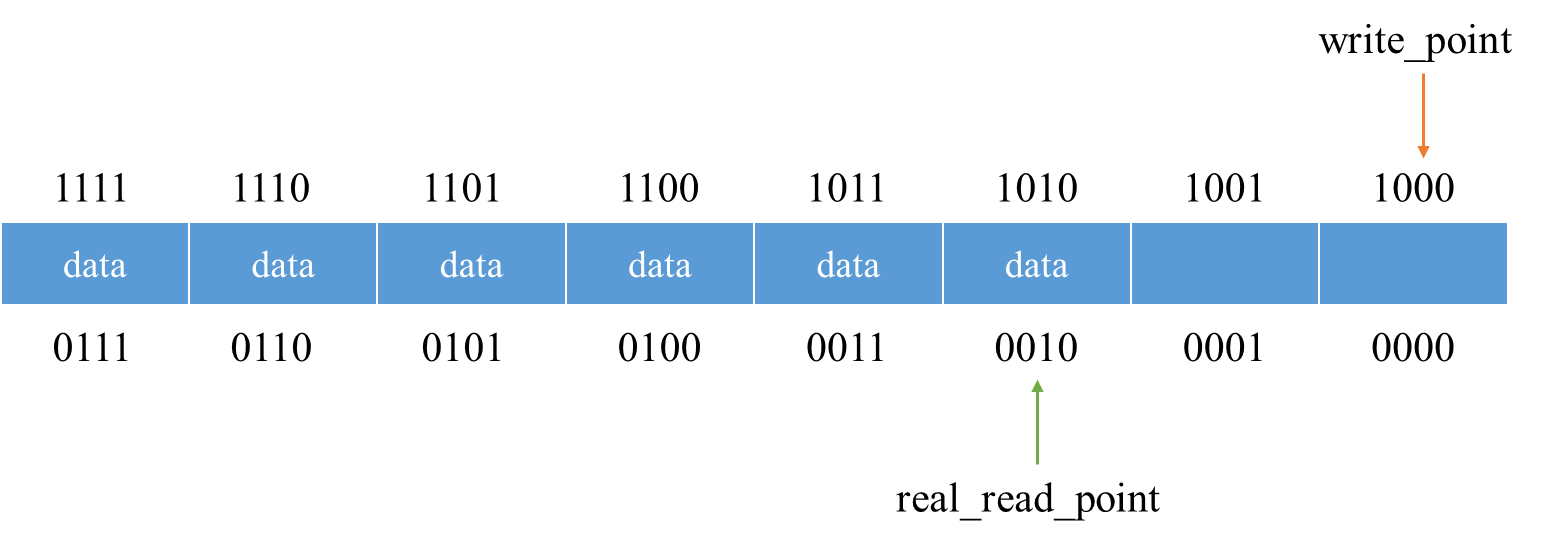
“写满”的判断:需要将读指针同步到写时钟域,再与写指针判断
假设本来是这样的:
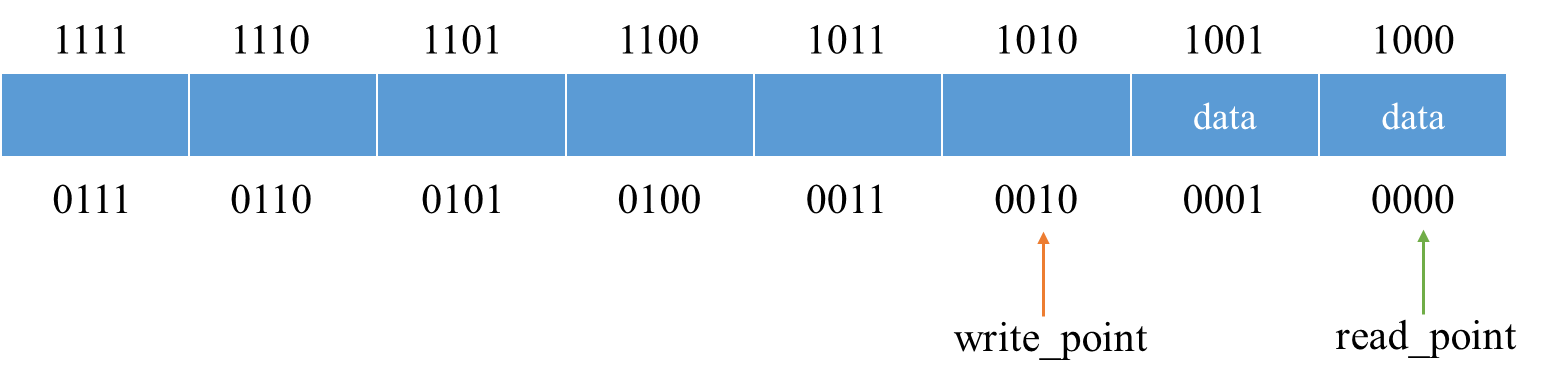
如果在2拍(写时钟下)时间内,写指针从0010写到0111,此时写指针和读指针(延时两拍后的,并非真实读指针)指向同一地址,FIFO为满
但其实在这段时间内,可能真实读指针已经读出了数据,所以此时存在“虚满”状态
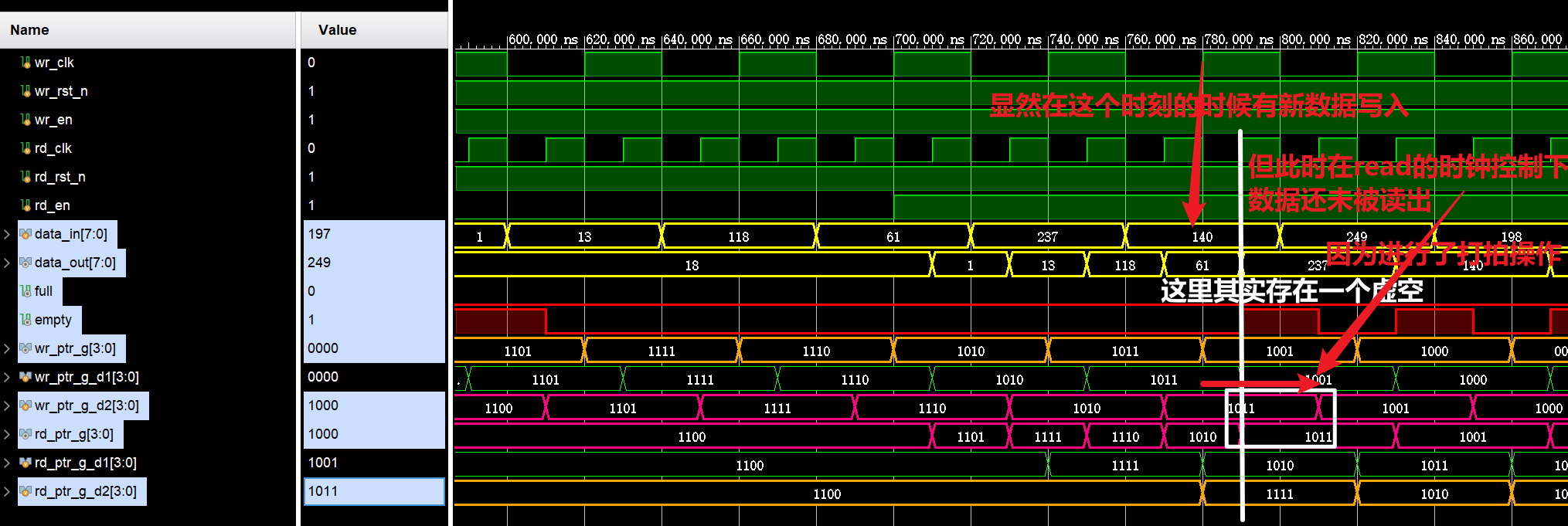
“读空”的判断:需要将写指针同步到读时钟域,再与读指针判断
假设本来是这样的:
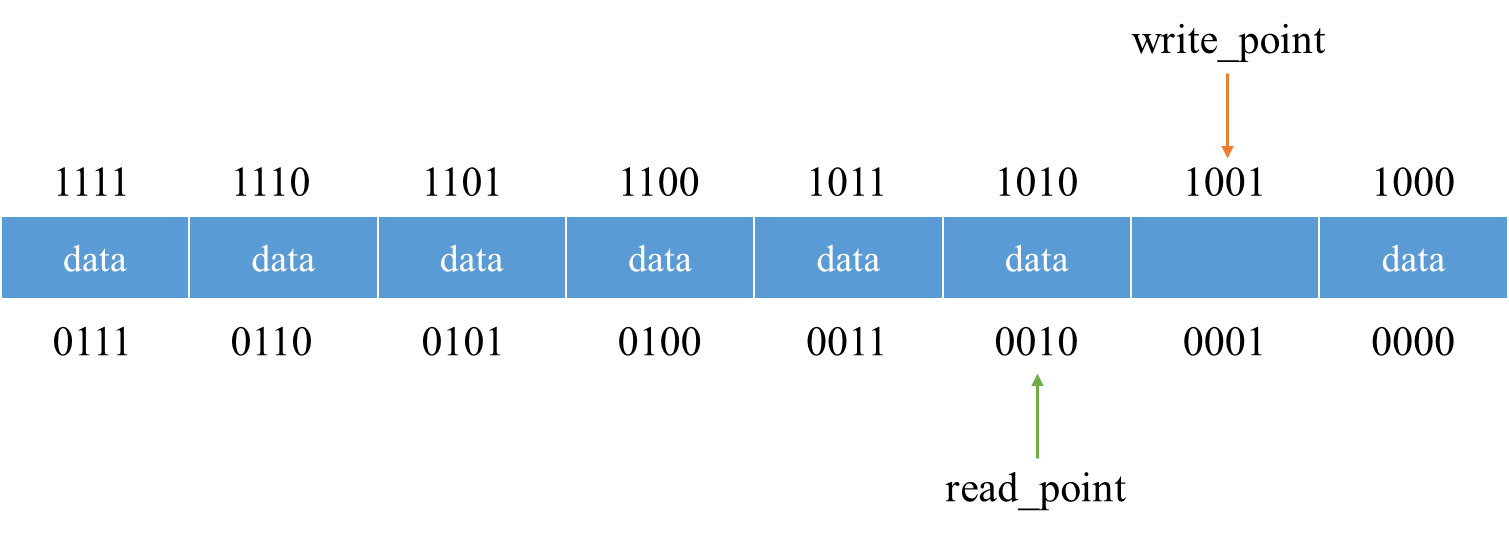
如果在2拍(读时钟下)时间内,读指针从0010读到0111再到1000,此时写指针和读指针(延时两拍后的,并非真实写指针)指向同一地址,FIFO为空
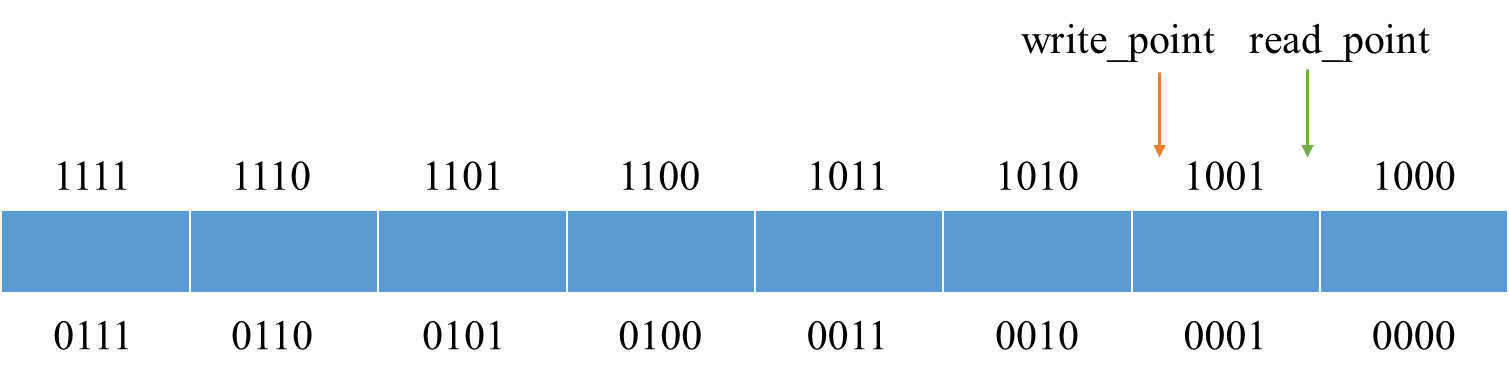
但其实在这段时间内,可能真实写指针已经写入了数据,所以此时存在“虚空”状态
2.源代码
async_fifo.v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
//异步FIFO
module async_fifo
#(
parameter DATA_WIDTH = 'd8 , //FIFO位宽
parameter DATA_DEPTH = 'd16 //FIFO深度
)
(
//写数据
input wr_clk , //写时钟
input wr_rst_n , //低电平有效的写复位信号
input wr_en , //写使能信号,高电平有效
input [DATA_WIDTH-1:0] data_in , //写入的数据
//读数据
input rd_clk , //读时钟
input rd_rst_n , //低电平有效的读复位信号
input rd_en , //读使能信号,高电平有效
output reg [DATA_WIDTH-1:0] data_out , //输出的数据
//状态标志
output empty , //空标志,高电平表示当前FIFO已被写满
output full //满标志,高电平表示当前FIFO已被读空
);
//reg define
//用二维数组实现RAM
reg [DATA_WIDTH - 1 : 0] fifo_buffer[DATA_DEPTH - 1 : 0];
reg [$clog2(DATA_DEPTH) : 0] wr_ptr; //写地址指针,二进制
reg [$clog2(DATA_DEPTH) : 0] rd_ptr; //读地址指针,二进制
reg [$clog2(DATA_DEPTH) : 0] rd_ptr_g_d1; //读指针格雷码在写时钟域下同步1拍
reg [$clog2(DATA_DEPTH) : 0] rd_ptr_g_d2; //读指针格雷码在写时钟域下同步2拍
reg [$clog2(DATA_DEPTH) : 0] wr_ptr_g_d1; //写指针格雷码在读时钟域下同步1拍
reg [$clog2(DATA_DEPTH) : 0] wr_ptr_g_d2; //写指针格雷码在读时钟域下同步2拍
//wire define
wire [$clog2(DATA_DEPTH) : 0] wr_ptr_g; //写地址指针,格雷码
wire [$clog2(DATA_DEPTH) : 0] rd_ptr_g; //读地址指针,格雷码
wire [$clog2(DATA_DEPTH) - 1 : 0] wr_ptr_true; //真实写地址指针,作为写ram的地址
wire [$clog2(DATA_DEPTH) - 1 : 0] rd_ptr_true; //真实读地址指针,作为读ram的地址
//地址指针从二进制转换成格雷码
assign wr_ptr_g = wr_ptr ^ (wr_ptr >> 1);
assign rd_ptr_g = rd_ptr ^ (rd_ptr >> 1);
//读写RAM地址赋值
assign wr_ptr_true = wr_ptr [$clog2(DATA_DEPTH) - 1 : 0]; //写RAM地址等于写指针的低DATA_DEPTH位(去除最高位)
assign rd_ptr_true = rd_ptr [$clog2(DATA_DEPTH) - 1 : 0]; //读RAM地址等于读指针的低DATA_DEPTH位(去除最高位)
//写操作,更新写地址
always @ (posedge wr_clk or negedge wr_rst_n) begin
if (!wr_rst_n)
wr_ptr <= 0;
else if (!full && wr_en)begin //写使能有效且非满
wr_ptr <= wr_ptr + 1'd1;
fifo_buffer[wr_ptr_true] <= data_in;
end
end
//将读指针的格雷码同步到写时钟域,来判断是否写满
always @ (posedge wr_clk or negedge wr_rst_n) begin
if (!wr_rst_n)begin
rd_ptr_g_d1 <= 0; //寄存1拍
rd_ptr_g_d2 <= 0; //寄存2拍
end
else begin
rd_ptr_g_d1 <= rd_ptr_g; //寄存1拍
rd_ptr_g_d2 <= rd_ptr_g_d1; //寄存2拍
end
end
//读操作,更新读地址
always @ (posedge rd_clk or negedge rd_rst_n) begin
if (!rd_rst_n)
rd_ptr <= 'd0;
else if (rd_en && !empty)begin //读使能有效且非空
data_out <= fifo_buffer[rd_ptr_true];
rd_ptr <= rd_ptr + 1'd1;
end
end
//将写指针的格雷码同步到读时钟域,来判断是否读空
always @ (posedge rd_clk or negedge rd_rst_n) begin
if (!rd_rst_n)begin
wr_ptr_g_d1 <= 0; //寄存1拍
wr_ptr_g_d2 <= 0; //寄存2拍
end
else begin
wr_ptr_g_d1 <= wr_ptr_g; //寄存1拍
wr_ptr_g_d2 <= wr_ptr_g_d1; //寄存2拍
end
end
//更新指示信号
//当所有位相等时,读指针追到到了写指针,FIFO被读空
assign empty = ( wr_ptr_g_d2 == rd_ptr_g ) ? 1'b1 : 1'b0;
//当高位相反且其他位相等时,写指针超过读指针一圈,FIFO被写满
//同步后的读指针格雷码高两位取反,再拼接上余下位
assign full = ( wr_ptr_g == { ~(rd_ptr_g_d2[$clog2(DATA_DEPTH) : $clog2(DATA_DEPTH) - 1])
,rd_ptr_g_d2[$clog2(DATA_DEPTH) - 2 : 0]})? 1'b1 : 1'b0;
endmodule
3.Testbench
async_fifo_tb.v
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
module async_fifo_tb;
parameter DATA_WIDTH = 8 ; //FIFO位宽
parameter DATA_DEPTH = 8 ; //FIFO深度
reg wr_clk ; //写时钟
reg wr_rst_n ; //低电平有效的写复位信号
reg wr_en ; //写使能信号,高电平有效
reg [DATA_WIDTH-1:0] data_in ; //写入的数据
reg rd_clk ; //读时钟
reg rd_rst_n ; //低电平有效的读复位信号
reg rd_en ; //读使能信号,高电平有效
wire[DATA_WIDTH-1:0] data_out ; //输出的数据
wire empty ; //空标志,高电平表示当前FIFO已被写满
wire full ; //满标志,高电平表示当前FIFO已被读空
//------------<例化被测试模块>----------------------------------------
async_fifo
#(
.DATA_WIDTH (DATA_WIDTH), //FIFO位宽
.DATA_DEPTH (DATA_DEPTH) //FIFO深度
)
async_fifo_inst(
.wr_clk (wr_clk ),
.wr_rst_n (wr_rst_n ),
.wr_en (wr_en ),
.data_in (data_in ),
.rd_clk (rd_clk ),
.rd_rst_n (rd_rst_n ),
.rd_en (rd_en ),
.data_out (data_out ),
.empty (empty ),
.full (full )
);
//------------<设置初始测试条件>----------------------------------------
initial begin
rd_clk = 1'b0; //初始时钟为0
wr_clk = 1'b0; //初始时钟为0
wr_rst_n <= 1'b0; //初始复位
rd_rst_n <= 1'b0; //初始复位
wr_en <= 1'b0;
rd_en <= 1'b0;
data_in <= 'd0;
#5
wr_rst_n <= 1'b1;
rd_rst_n <= 1'b1;
//重复8次写操作,让FIFO写满
repeat(8) begin
@(negedge wr_clk)begin
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
end
end
//拉低写使能
@(negedge wr_clk) wr_en <= 1'b0;
//重复8次读操作,让FIFO读空
repeat(8) begin
@(negedge rd_clk)rd_en <= 1'd1;
end
//拉低读使能
@(negedge rd_clk)rd_en <= 1'd0;
//重复4次写操作,写入4个随机数据
repeat(4) begin
@(negedge wr_clk)begin
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
end
end
//持续同时对FIFO读
@(negedge rd_clk)rd_en <= 1'b1;
//持续同时对FIFO写,写入数据为随机数据
forever begin
@(negedge wr_clk)begin
wr_en <= 1'b1;
data_in <= $random; //生成8位随机数
end
end
end
//------------<设置时钟>----------------------------------------------
always #10 rd_clk = ~rd_clk; //读时钟周期20ns
always #20 wr_clk = ~wr_clk; //写时钟周期40ns
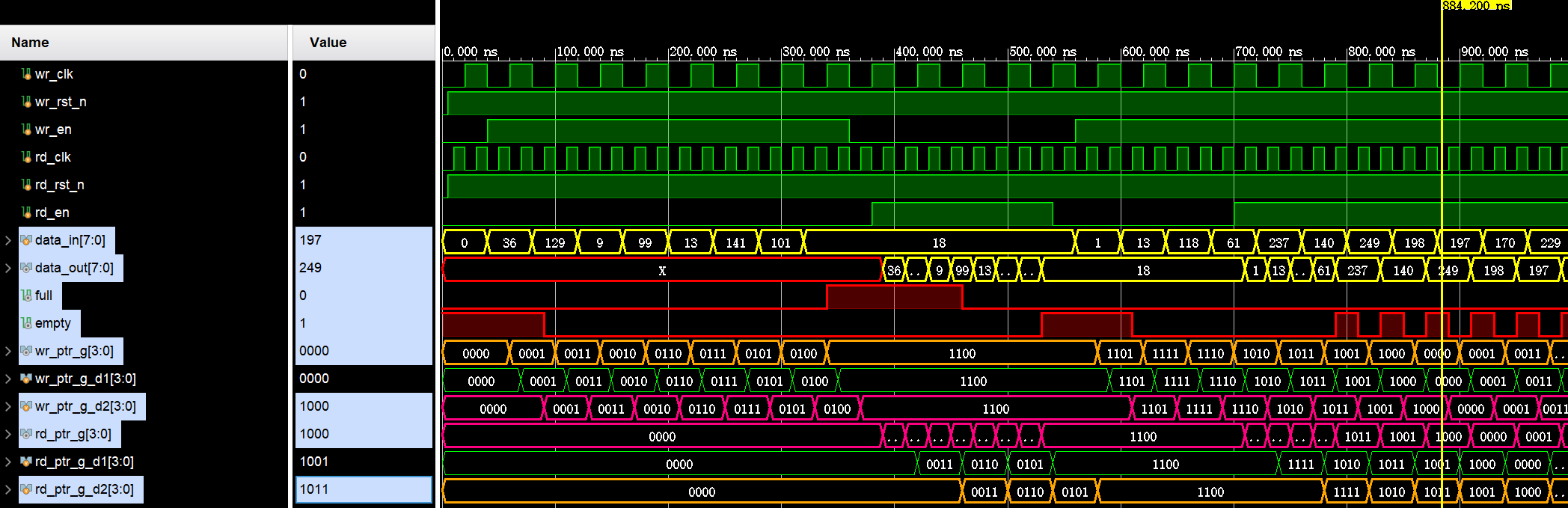
endmodule结果如下:
整体结果:
细节展示:
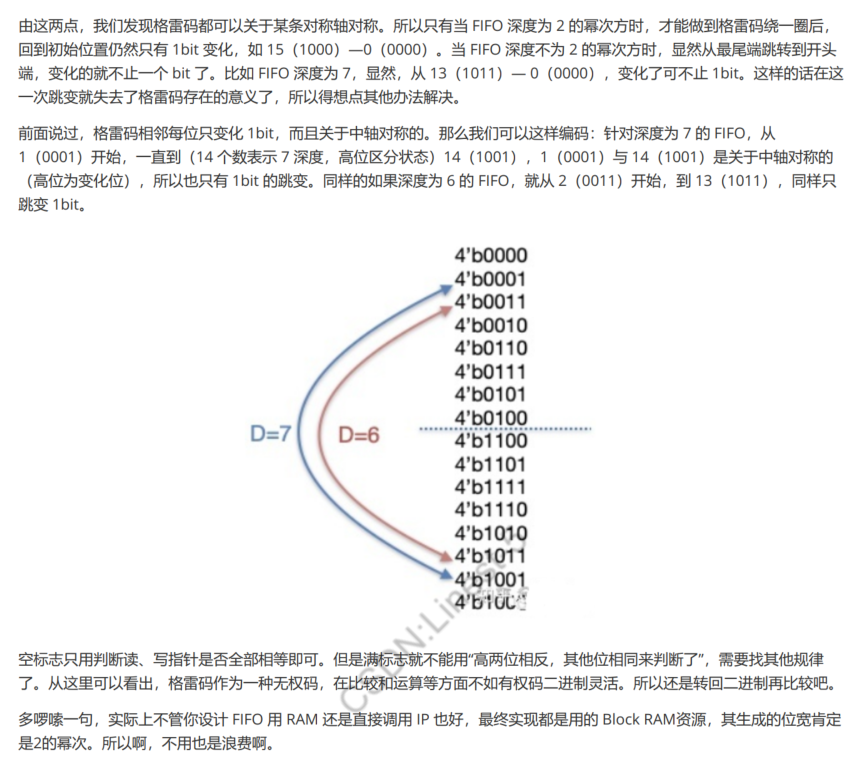
格雷码性质
在一组数的编码中,若任意两个相邻的代码只有一位二进制数不同,则称这种编码为格雷码
$2^N$深度的FIFO,使用的格雷码关于中轴对称
Reference
- FIFO概述_哔哩哔哩_bilibili(FIFO的基本概念)
- 新新新手Icer练习(五):同步+异步FIFO的实现_哔哩哔哩_bilibili(同步与异步FIFO原理性的介绍)
- 同步FIFO的两种Verilog设计方法(计数器法、高位扩展法)_fifo同时读写计数器-CSDN博客(同步FIFO解释得很清楚)
- <FPGA>异步FIFO的Verilg实现方法_fpga fifo verilog-CSDN博客(异步FIFO也解释得比较清楚,但跨时钟域那可能会难以理解,得自己边画图或者和仿真结果理解)
- FPGA设计的“打拍(寄存)”和“亚稳态” 到底是什么?_fpga打拍的作用-CSDN博客(亚稳态问题的解释)
- 关于异步FIFO设计,这7点你必须要搞清楚_异步fifo设计要素-CSDN博客
