本节是针对TI官方提供的波形配置的文档进行了阅读,并分析了文档中主要讲了哪些模块
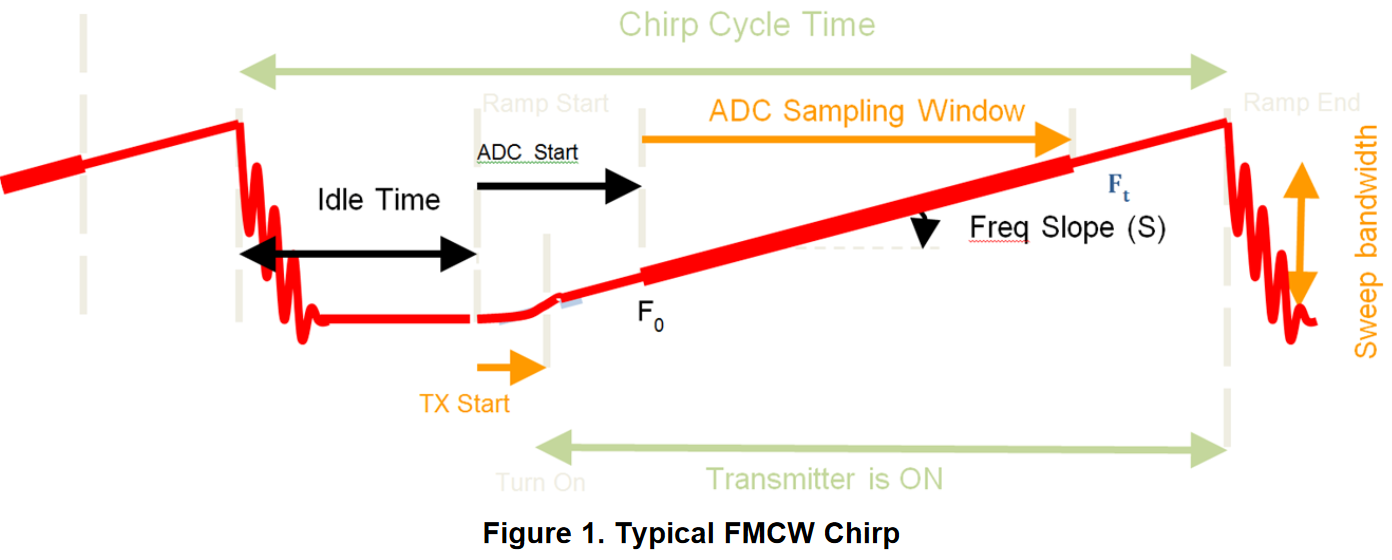
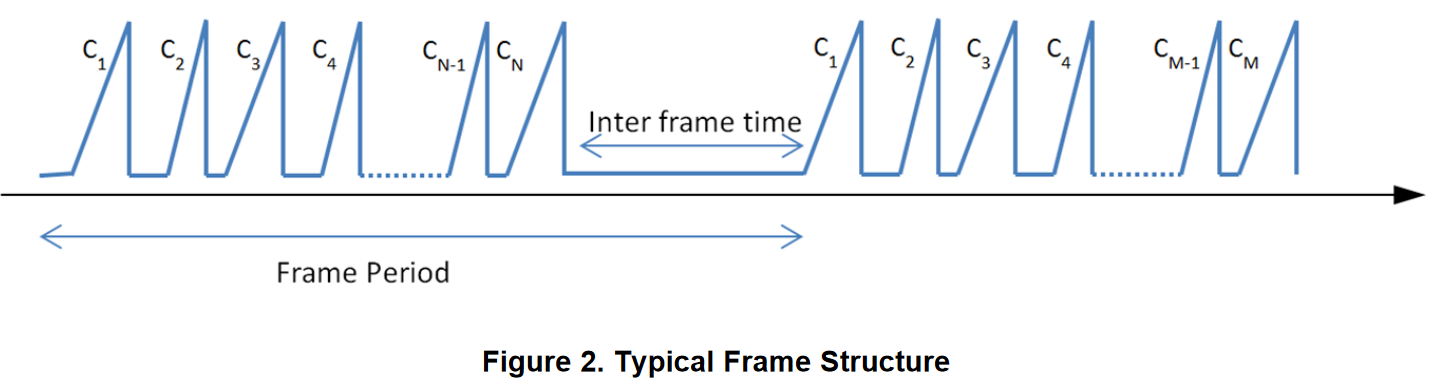
典型FMCW chirp和Fram Structure
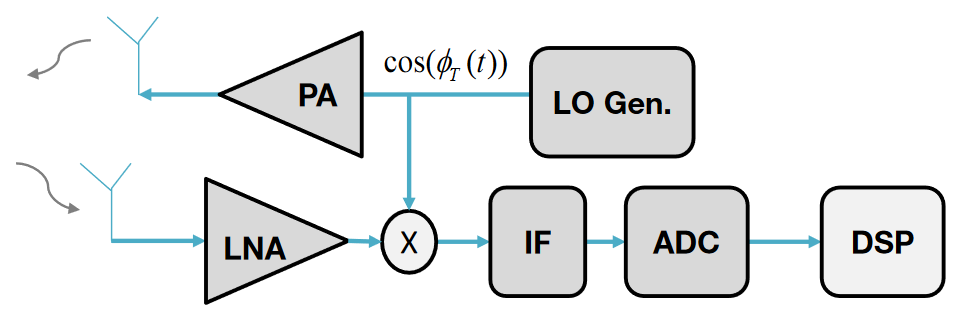
FMCW测量目标信息
1.测距及距离分辨率
距离计算:
距离分辨率:
因为雷达采集板提供的带宽有限(TI’sAWR2243 radar device provides a large 20-MHz bandwidth),所以最大距离收到了中频带宽的限制,有:
在complex 1x采样模式,中频带宽限制为$0.9\times ADC_{采样频率}$;在complex 2x和real采样模式下,IF带宽限制为$0.9\times \frac{ADC_{采样频率}}{2}$(hemaximum ADC sampling frequency inthe TI’sradar devices is45MHz (AWR22xx))
但是并不能看懂,什么是complex 1x和complex 2x和real模式,于是就搜啊搜,搜到的也很少
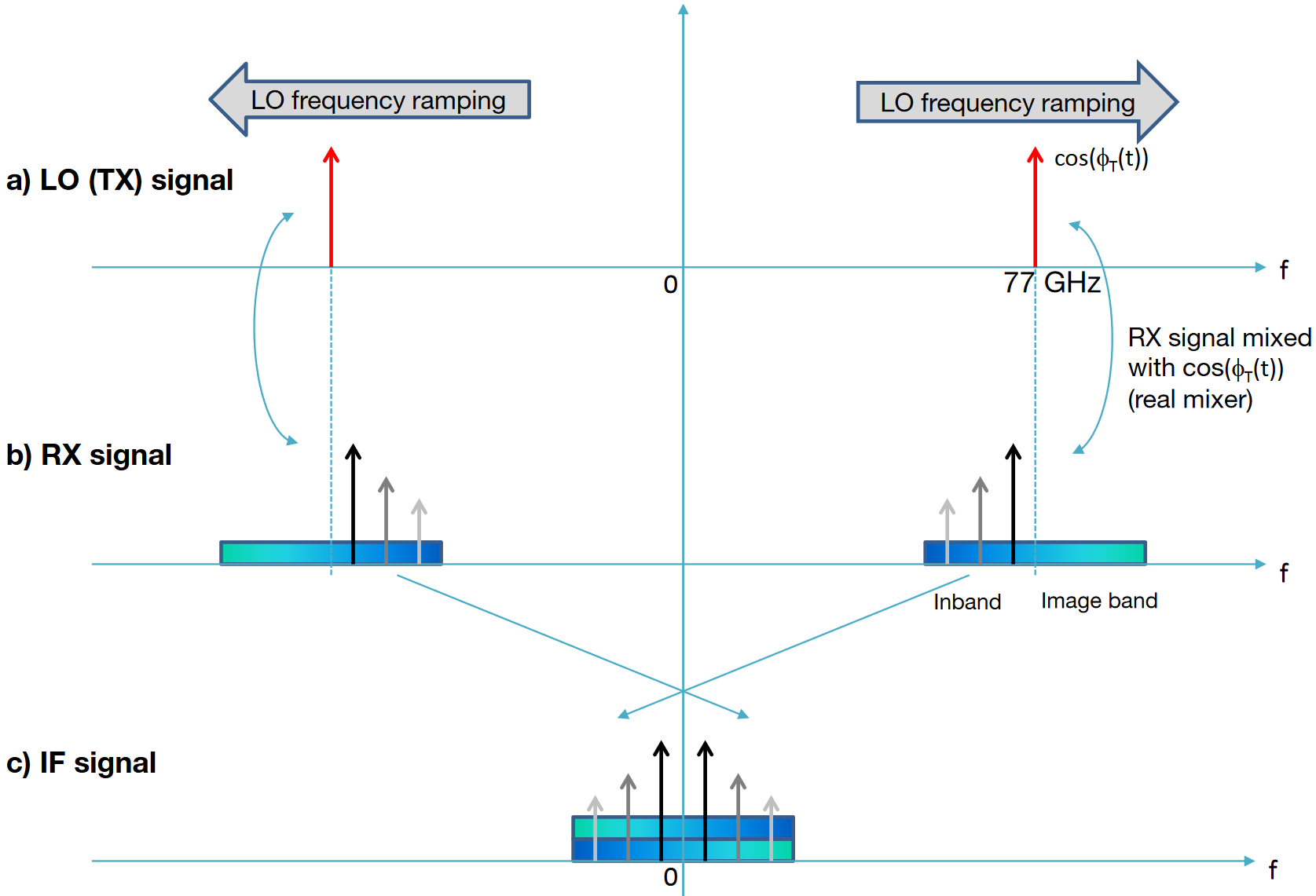
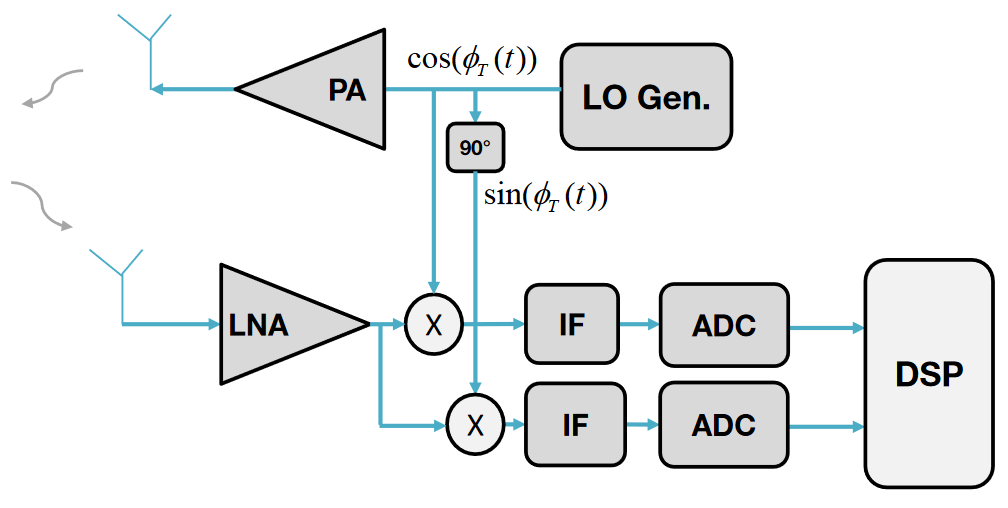
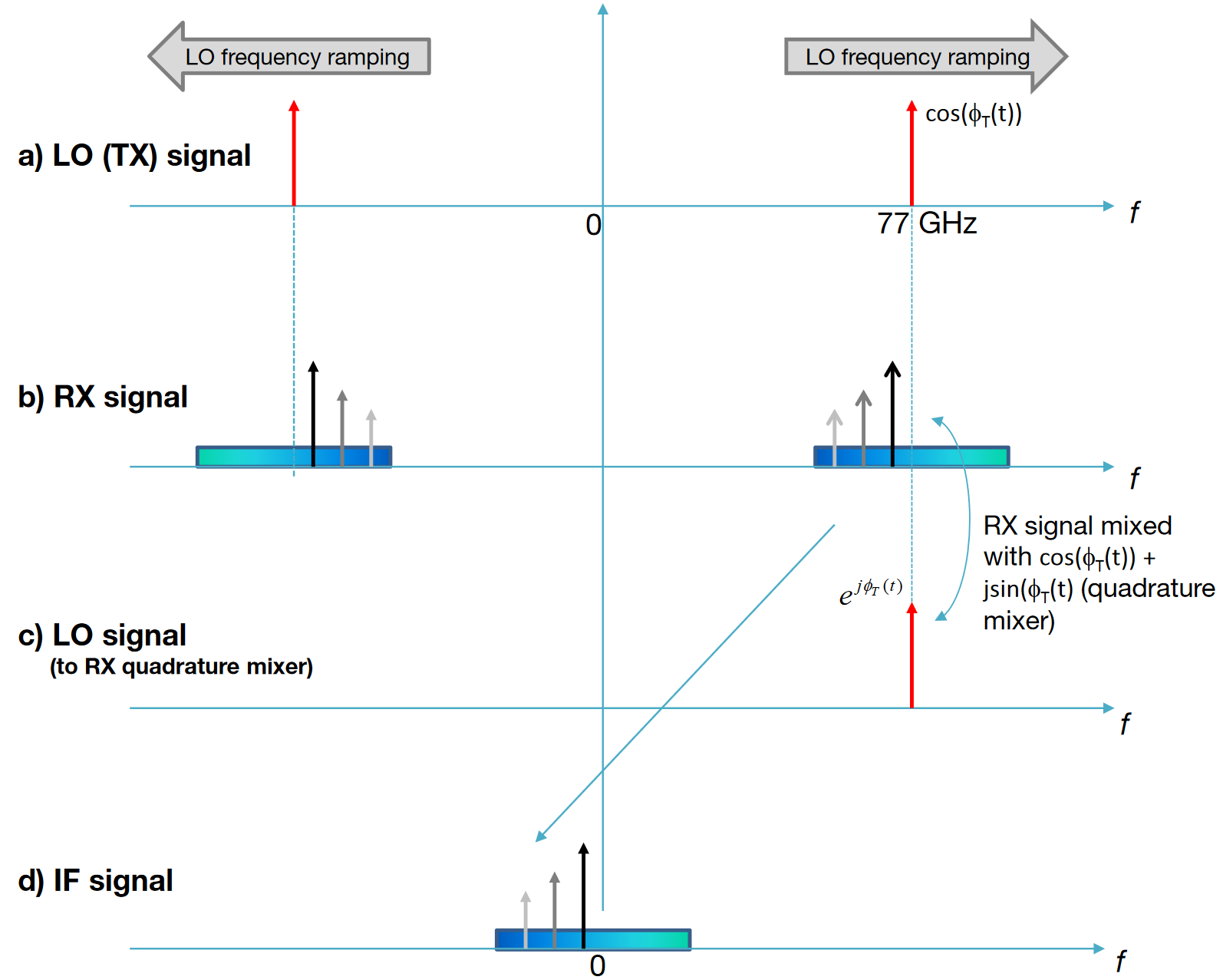
搜到了一张图关于它们三者的一张图

还有一个指路文档:Using a complex-baseband architecture in FMCW radar systems.pdf,说是在这个文档里面有更加详细的解释,但是,依然没有在这个文档里面把这三种采样模式看得很明白,只是能知道IQ通道复数采用和实数采样的中频信号,但实在不懂这怎么就跟中频带宽去对应上的
接收信号与实数信号混频后的中频信号
接收信号与复数信号混频后的中频信号
2.测速与速度分辨率
速度计算:
最大无模糊速度:
速度分辨率:
3.测角与角度分辨率
角度计算:
最大无模糊角度:
角度分辨率:
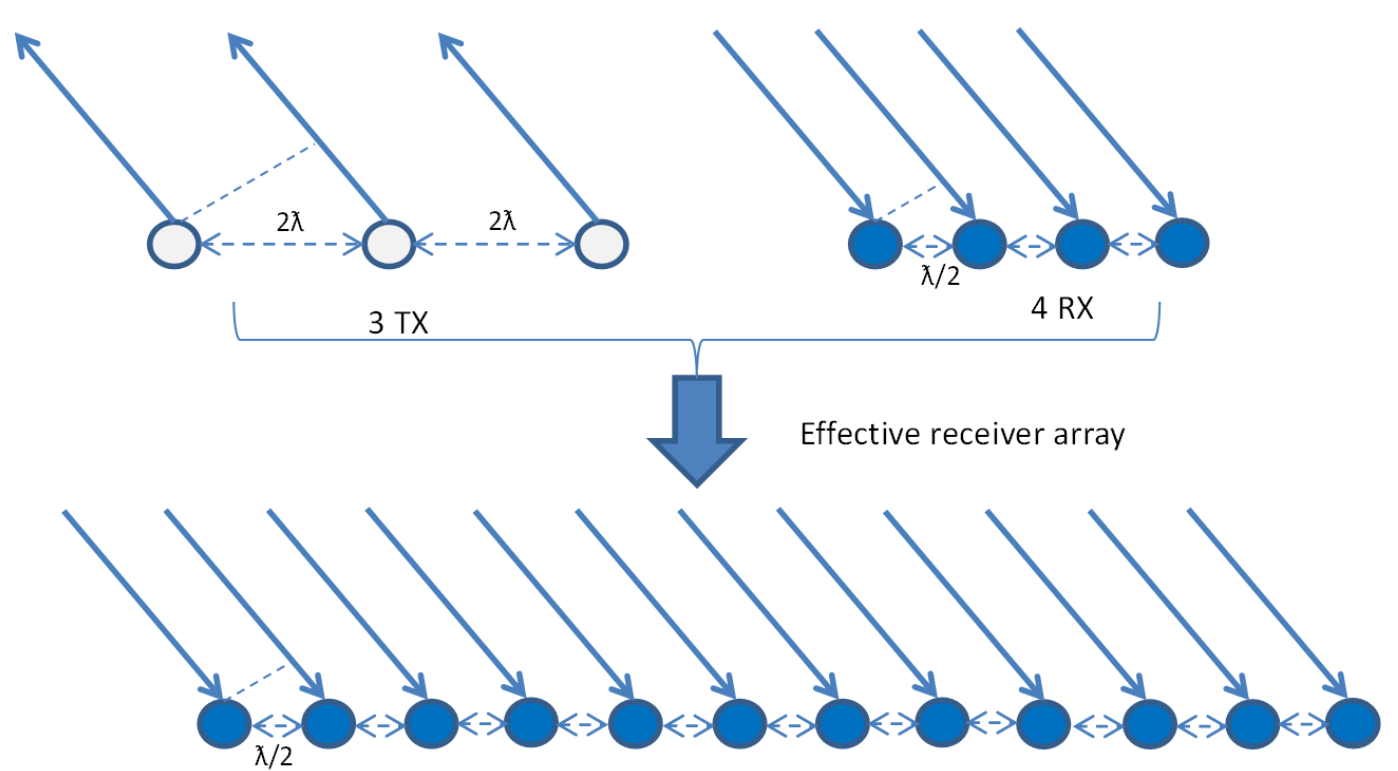
MIMO雷达的有效接收通道:
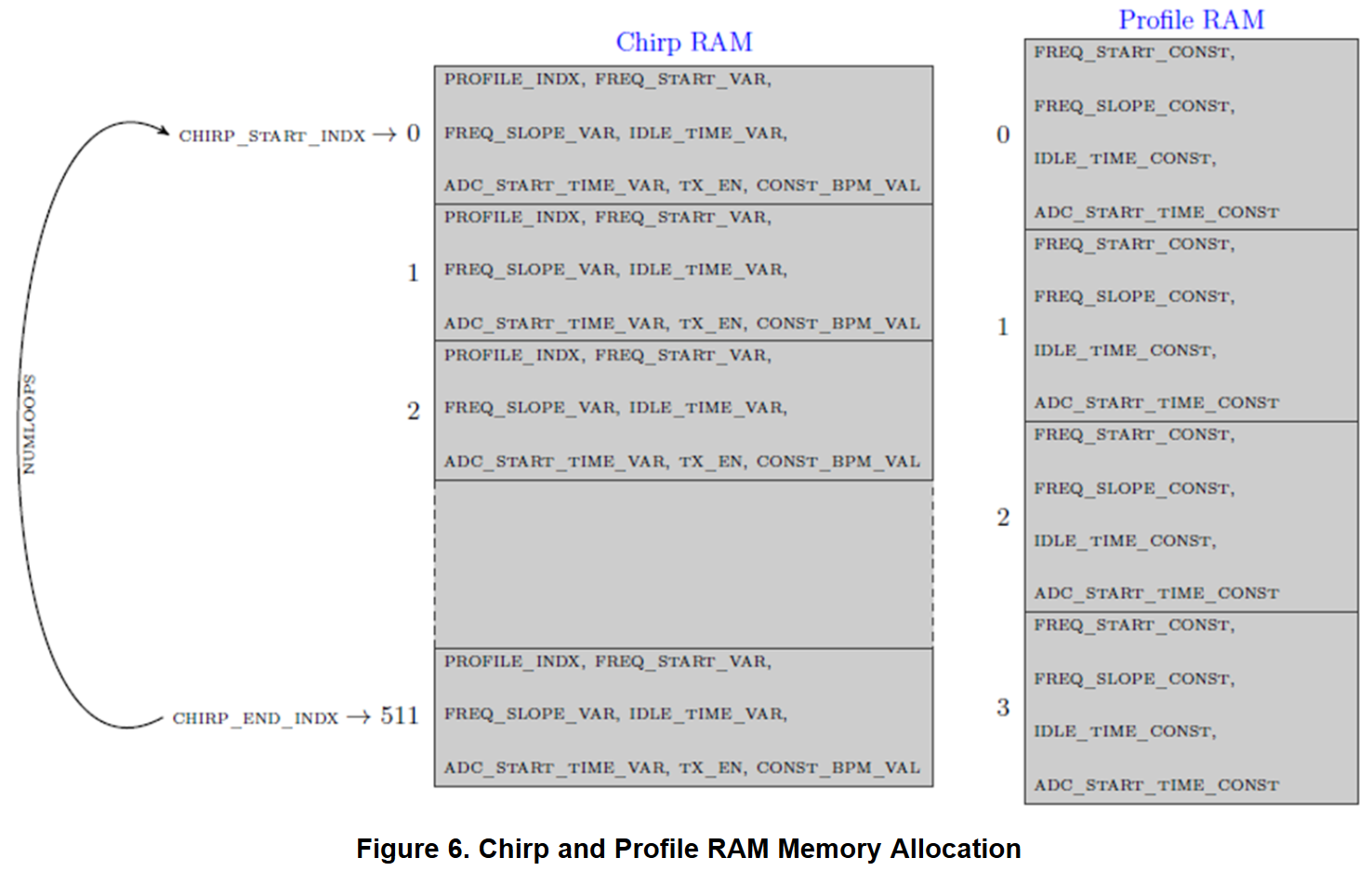
配置Chirp RAM and Chirp Profiles
Chirp Profiles是基本的 Chirp 配置模板,可用于定义在一个或多个定义参数(起始频率、斜率、空闲时间等)方面具有显着差异的 Chirp 变体
Chirp RAM:是在Chirp Profiles配置模板上的细小变化,最多可对 512 个独特的chirp进行预编程并存储在Chirp RAM 中(感觉这里文档中没有解释得很清楚,并没有整明白Chirp RAM中每一个chirp究竟在对应的配置模板上,多了哪些细微的配置)
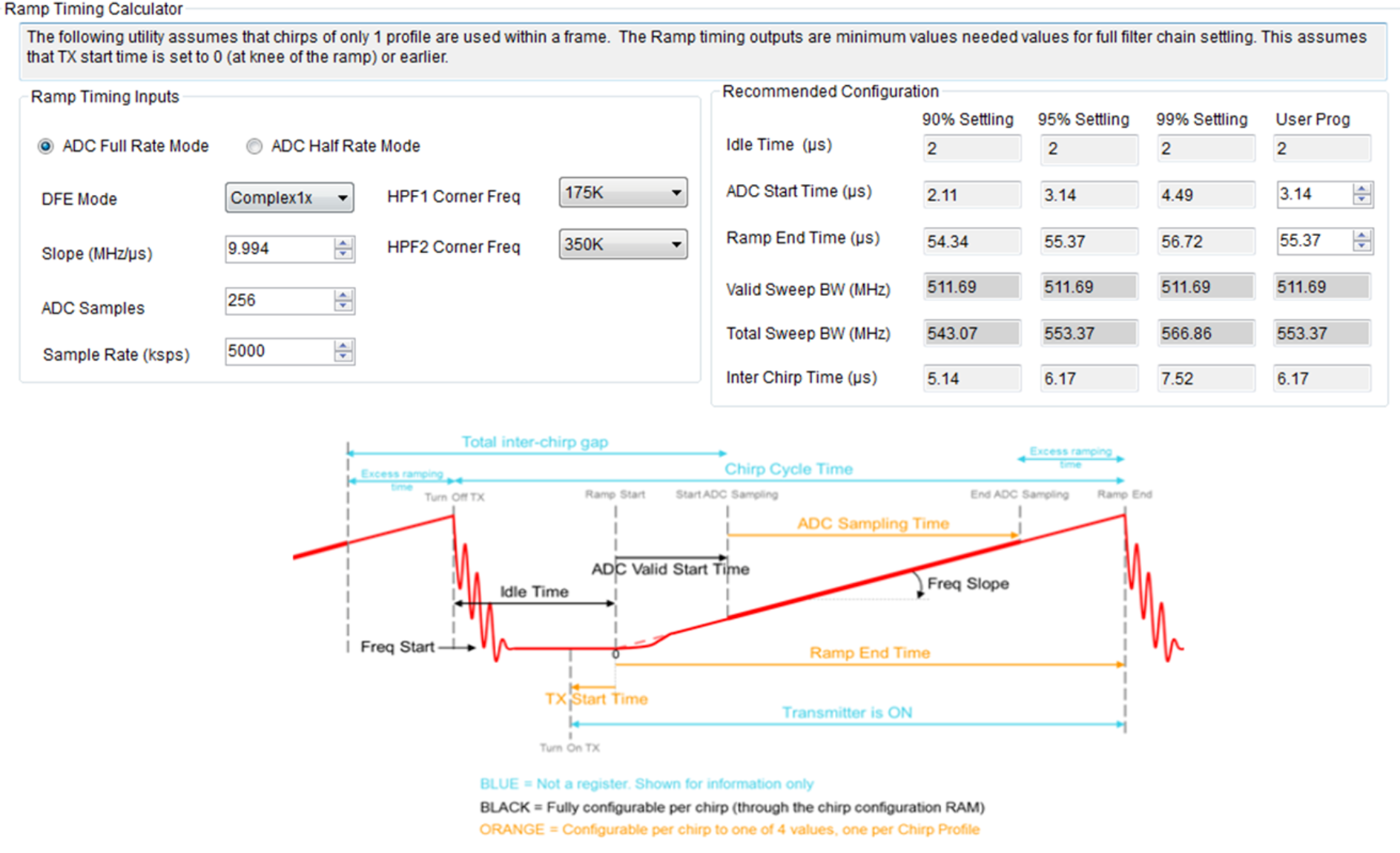
Chirp的时序参数
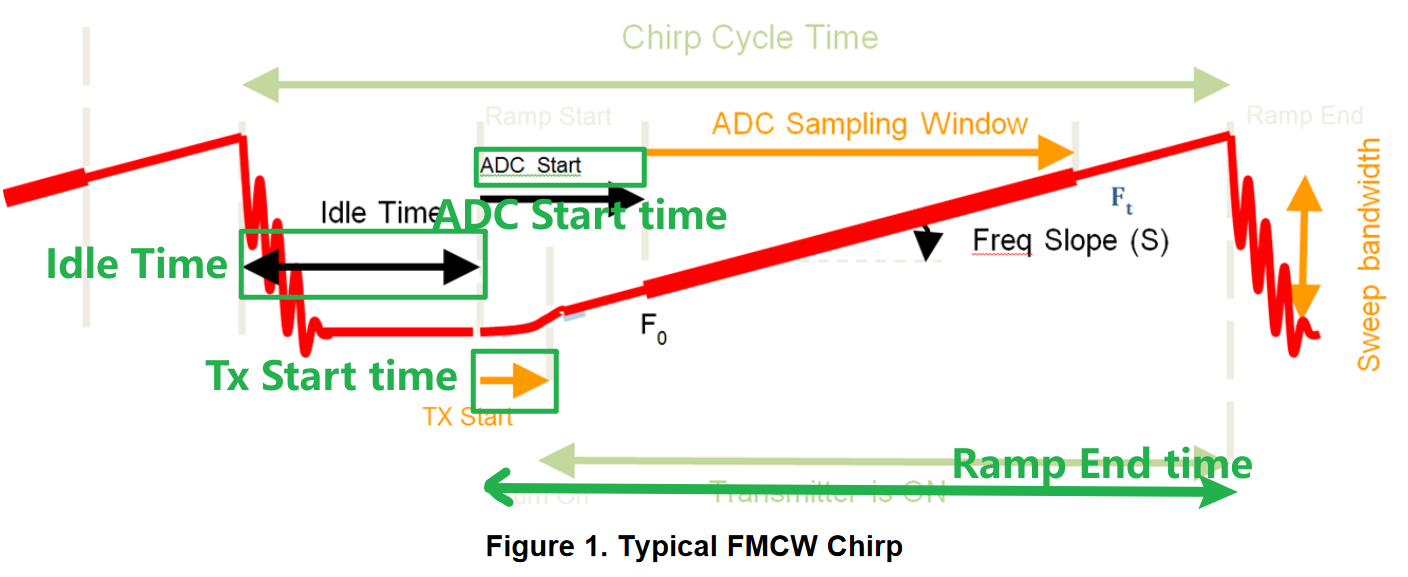
其实在mmwave中输入slope, ADC samples, sampling rate,就能自动配置这些时序参数
高级帧配置Advanced Chirp Configurations
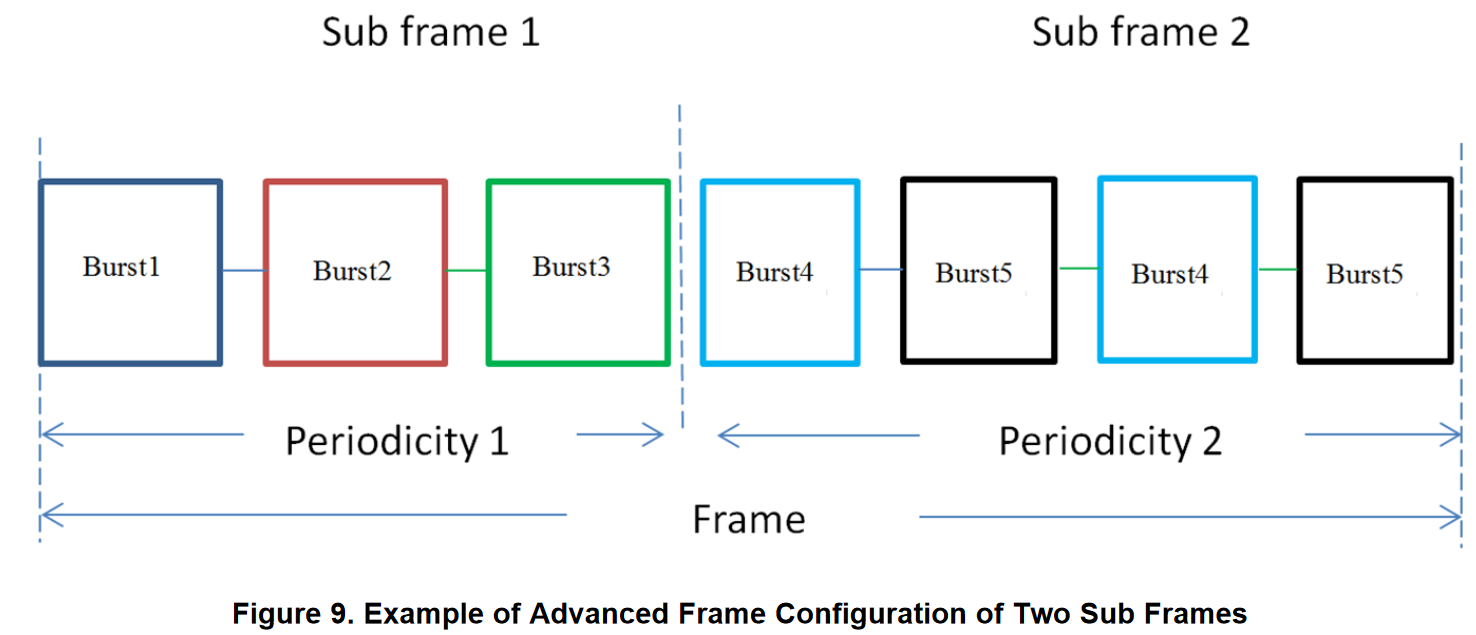
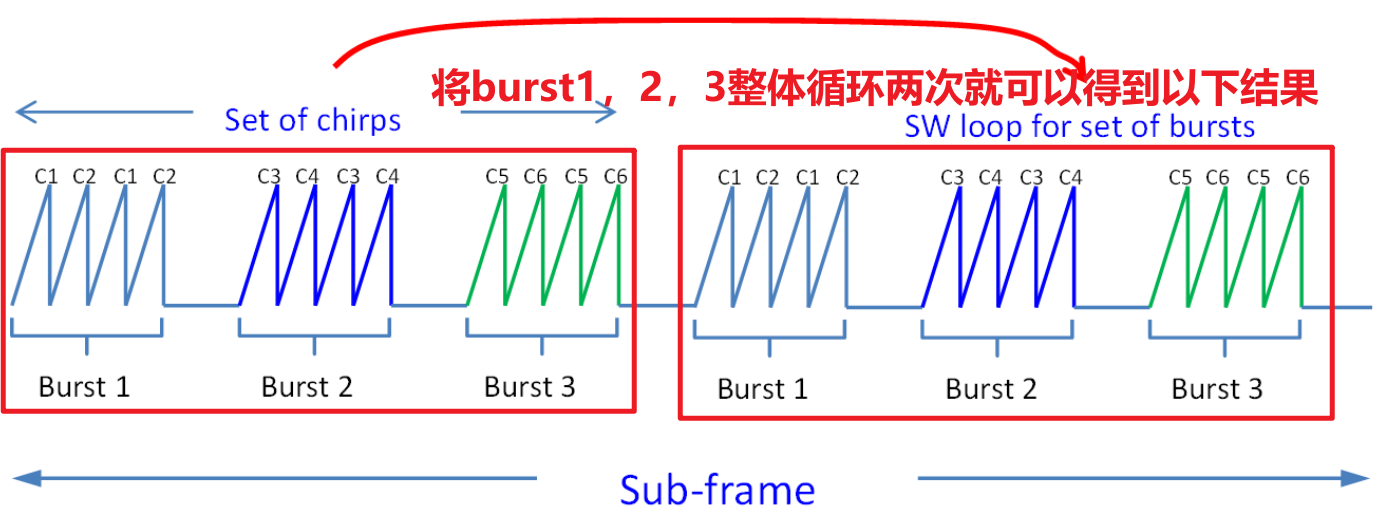
高级帧配置 API 提供了将帧分成不同子帧(最多 4 个,因为chirp profile模板的个数最多为4)的功能
每个子帧由多个线性调频脉冲串(bursts of chirps)(最多512个脉冲串)组成。
每个脉冲串(bursts)可以最多可由 512 个独特的chirp(因为chirp RAM最多是512)组成
子帧中的一系列脉冲串可以在软件中循环最多 64 次,就是把几个不同的脉冲串捆在一起,然后循环最多64次
二进制相位调制(BPM-MIMO)
- 原理详情请见:SWRA554A.pdf
- 可以通过”rlSetBpmChirpConfig ”API进行相关配置
Chirp配置的顺序

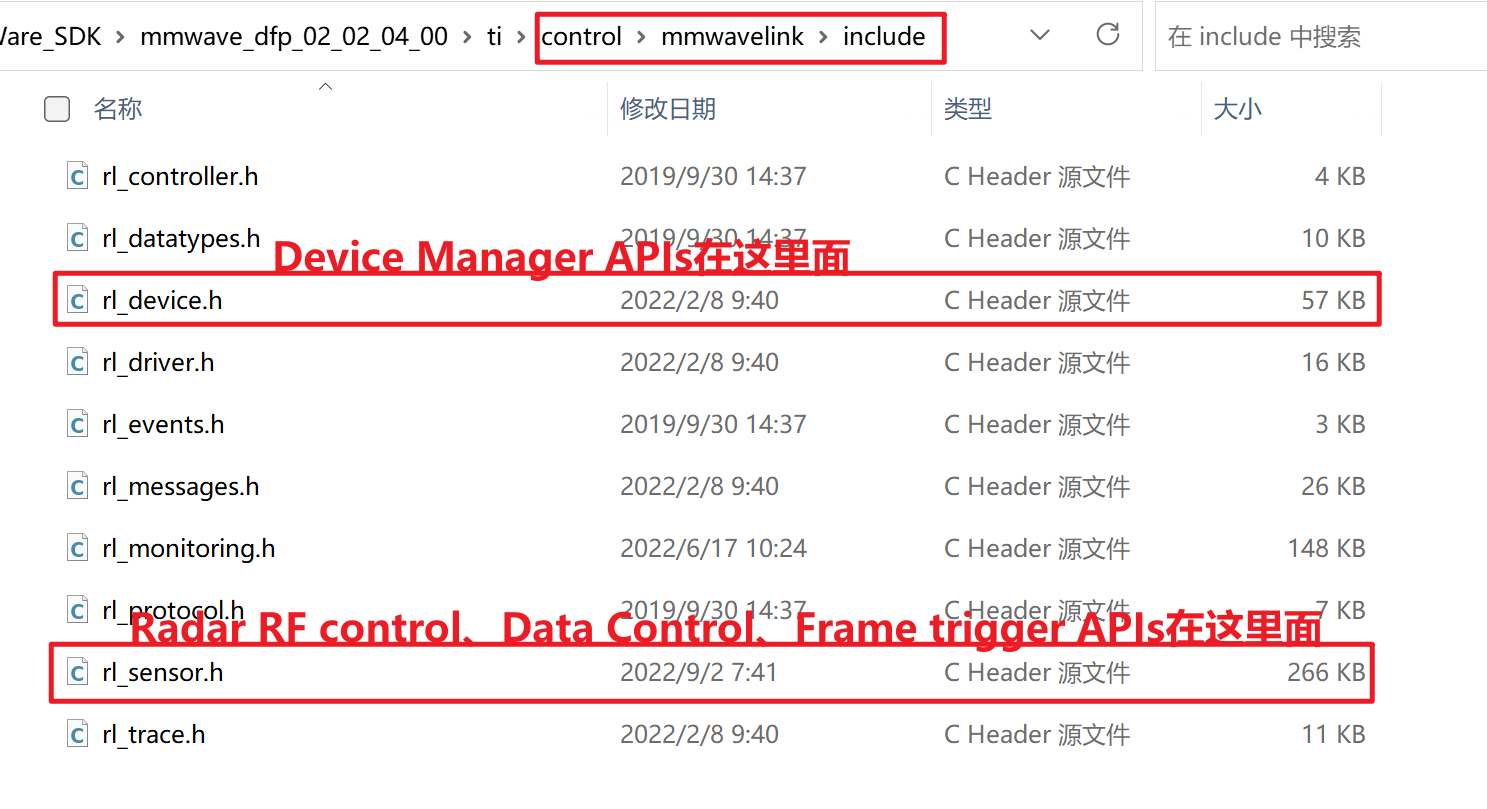
1.Device Manager APIs
- 这些 API 用于启动和初始化传感器:
- rlDevicePowerOn:该函数初始化驱动程序并为驱动程序进行必要的资源分配。 它通过创建必要的操作系统服务(如信号量、互斥锁、队列等)来初始化主机协议驱动程序。 它还使雷达设备(级联时为多个设备)脱离重置,并打开与这些设备的通信通道(SPI、邮箱等)
- DeviceFileDownload:此函数将二进制文件从主机下载到雷达设备的内部 RAM。 该文件可以是固件补丁文件、应用程序代码、校准数据或配置数据。
- rlDeviceRfStart:该函数初始化雷达设备中的 RF(BIST) 子系统。 该函数立即返回,并且异步事件 (RL_EVENT_AR_DEVICE_START_COMPLETE) 指示 RF 初始化完成。 用户应用程序应在调用任何雷达传感器控制 API 之前等待此事件。
2.Radar RF Control APIs
- 这些 API 用于配置 RF 参数、线性调频脉冲配置文件和帧配置:
- rlSetChannelConfig:此API允许配置要使用的TX数量(共 3 个)和 RX数量(共 4 个)。 它还允许选择是在独立模式还是级联模式下使用传感器。
- rlSetAdcOutConfig:此 API 允许配置每个样本的bit位数 (12/14/16)。 它还允许选择ADC数据是否应为real、complex-1x 或complex- 2x。
- rlSetLowPowerModeConfig:该 API 允许设置低功耗 ADC 模式以节省电量。 在此模式下,最大 ADC 采样率受到限制。
- rlSetProfileConfig:配置Chirp Profiles,这些配置包括:chirp start frequency, idle time, ADC start time, chirp slope, chirp duration, TX power level in the chirp, number of ADC samples per chirp, the ADC sampling rate, High pass filter (HPF) cut off frequencies and RX gain setting.(这里有个疑问是为什么文档中在将chirp profile的时候并没有给出这么多要设置的量)
- rlSetChirpConfig:一旦定义了配置文件,每个独特的chirp都可以与这些配置文件中的一个相关联。 除此之外,API 还允许在一些重要参数(例如start frequency, idle time and ADC start time)中进行有限的线性调频脉冲变化(超出配置文件)。
- rlSetFrameConfig:This API allows selecting the sequence of the chirps that form the frame, number of frames that need to be transferred and the periodicity of the frames. The periodicity would define the inter-frame time (periodicity –chirp time), hence, the duty cycle of the transmission.(该 API 允许选择形成帧的线性调频脉冲序列、需要传输的帧数以及帧的周期性。 周期性将定义帧间时间(周期性-线性调频时间),从而定义传输的占空比。)
3.Radar Data Control APIs
- 在线性调频期间捕获的 ADC 数据通过高速调试接口或 CSI 传输出器件。
- Data Control APIs 允许配置需要传出的 ADC 数据和高速接口 (LVDS/CSI) 配置。 除了 ADC 数据外,还可以传输一些与线性调频信号质量和线性调频参数(分别称为 CQ(线性调频信号质量)和 CP(线性调频信号参数))相关的附加信息。
- 可以使用这些 API 完成 LVDS/CSI 配置、通道配置等。
4.Frame Trigger API
- 一旦配置了线性调频脉冲和帧,就可以通过软件 API 或使用数字 SYNC_IN 信号硬件触发来触发它们。
- 触发框架的软件API是rlSensorStart。
TI’s mmwave link APIs的代码出处

- 这个代码文件目前我还没有细看,只是先找到了这几个接口的出处
其实在这个里面有一些不错的文档解释